




Ulm News, 06.11.2019 11:45
Mensch und Technik als starke Partner: Kooperatives Überholen in hoch automatisierten Fahrzeugen



 schließen
schließen
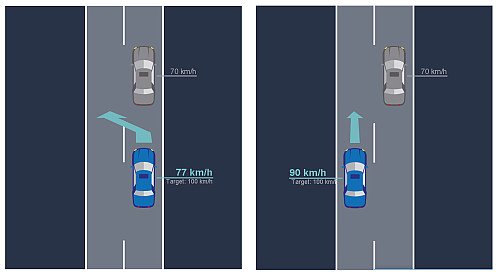
Beschreibung: Automatisches Überholen: Statusabbildung für das automatisierte Überholen
Fotograf: Marcel Walch / Universität Ulm)
Hoch automatisierte Fahrzeuge können Vieles besser als der Mensch. Überholmanöver auf zweispurigen Landstraßen gehören jedoch nicht dazu. Wissenschaftler der Universität Ulm haben nun ein kooperatives System konzipiert und untersucht, das für eine perfekte Aufgabenteilung beim Überholen sorgt. Der Mensch übernimmt die Entscheidung, und das Fahrzeug führt das Manöver aus. Vorgestellt und ausgezeichnet wurde diese wissenschaftliche Arbeit im Herbst auf der Leitmesse für Automobile Benutzerschnittstellen, der Automotive UI 2019 in Utrecht.
Noch immer gibt es beim Hochautomatisierten Fahren Systemgrenzen, die schwer zu überwinden sind. Zu den besonderen Schwächen gehört das Überholen bei Gegenverkehr. Oft verdeckt das vorausfahrende Fahrzeug die Weitsicht der Sensorik. Kommen dann noch Kurven, Kuppen oder Senken dazu, wird es für das Computersystem noch schwerer, sich mit technischen Mitteln einen Überblick über die Situation zu verschaffen. „Der Mensch weiß, dass Überholmanöver in solchen Situationen hochriskant sind“, erklärt Marcel Walch. Der Doktorand vom Institut für Medieninformatik ist Erstautor der mit dem „Best Paper Award“ ausgezeichneten Veröffentlichung. Gemeinsam mit dem Informatiker und Universitätspräsident Professor Michael Weber sowie mit Psychologen der Universität Ulm hat er ein kooperatives System entwickelt, das die jeweiligen Stärken von Fahrer und Fahrzeug kombiniert.
„Während der Mensch eine Verkehrssituation räumlich besser erfassen und damit verbundene Gefahren `realistischer´ einschätzen kann, besticht die Technik bei der Ausführung von Fahrmanövern“, so Walch. Da liegt es gewissermaßen auf der Hand, beide Stärken in einer kooperativen Strategie für Überholmanöver zu verbinden. Die Alternativen: das Fahrzeug verbleibt im Automatikbetrieb und muss weiter hinter dem langsameren Fahrzeug herfahren, oder der Fahrer muss „von Hand“ überholen. Dafür braucht es ein „Handover“, bei dem vom Automatikbetrieb auf manuell umgestellt werden.
„Wenn der Mensch das Verhalten der Automation als unangemessen erlebt, kann dies das Vertrauen in die Technik mindern und deren Akzeptanz schaden“, erklärt Professor Martin Baumann, Leiter der Abteilung Human Factors, der mit zwei Doktoranden an diesem Forschungsprojekt beteiligt ist. Denn der Mensch würde wohl erwarten, dass die Automation bei freier Gegenfahrbahn – eine Gefahr ist ja nicht erkennbar – ein Überholmanöver einleitet. Erklärt die Technik aber ihr Verhalten („Ich überhole nicht, weil meine Sicht eingeschränkt ist“) und macht deutlich, welche Unterstützung sie vom Menschen in dieser Situation braucht („Ist die Gegenfahrbahn frei?“), kann der Mensch die Technik besser „verstehen“ und adäquat unterstützen. Fahrer und Automation arbeiten perfekt zusammen.
Getestet wurde dieses kooperative System für Überholmanöver in einem hochmodernen Fahrsimulator im Institut für Human Factors, in dessen Cockpit ein großes Display eingebaut ist, über das Fahrer und Fahrzeug interagieren. Landschaft und Streckenverlauf werden auf drei große Leinwände projiziert. Simuliert wurde die Fahrt auf einer zweispurigen Landstraße mit rund 100 km/h. Dabei mussten auf einem variierenden Streckenverlauf langsamer fahrende Autos überholt werden, die mit rund 70 km/h unterwegs waren. Um es den Testfahrerinnen und -fahrern nicht zu leicht zu machen, mussten sie während der „Fahrt“ bestimmte Testaufgaben lösen. Hierdurch wurden unterschiedlich stark ablenkende Beschäftigungen simuliert. Das Fahrzeug war übrigens so programmiert, dass es recht dicht hinter dem vorausfahrenden langsameren Auto herfährt, um die „Sicht“ sowohl für den Fahrer als aus für die Sensorik des Fahrzeugs einzuschränken. Dadurch kam es – wie geplant – im Ex
periment öfter zu „brenzligen“ Situationen, in denen der Überholvorgang entweder automatisch abgebrochen wurde, oder vom Fahrenden manuell zurückgenommen werden konnte.
Das interdisziplinäre Forscherteam hat sich zudem überlegt, wie ein geeignetes Interaktionssystem aussehen könnte, mit dem der Fahrer den Überholvorgang auslösen und – bei Gegenverkehr – sicher und rechtzeitig wieder abbrechen kann. Für die Studie wurden zwei verschiedene Interaktionstechniken untersucht. Im „CLICK“-Verfahren musste auf einem Display zum Überholen auf einen „Überholen Erlauben“-Knopf gedrückt werden, der sich im Augenblick der Aktivierung zu einem „Überholvorgang Abbrechen“-Knopf verändert. Wird dieselbe Schaltfläche also ein zweites Mal berührt, stoppt das Auto den Überholvorgang. Bei der „HOLD“-Variante muss der Knopf zum Überholen so lange gedrückt bleiben, bis der Wechsel auf die Gegenfahrbahn abgeschlossen ist. Bei dem Experiment im Fahrsimulator zeigte sich, dass die „CLICK“-Variante von den Testfahrerinnen und -fahrern zwar als praktischer und nutzerfreundlicher angesehen wurde. Viele Probanden hielten die „HOLD“-Variante dagegen für sicherer; der Überholvorgang konnte damit bei Gefahr schneller abgebrochen werden.
Das Ergebnis der Studie: Die Wissenschaftler konnten zeigen, dass ein kooperativer Ansatz beim Überholen nicht nur sinnvoll und realisierbar ist, sondern von vielen Testfahrern auch dem manuellen Überholmanöver vorgezogen wurde. Es zeigte sich jedoch auch, dass der Mensch, insbesondere wenn er stärker abgelenkt ist, komplexen Situationen nicht immer gewachsen ist. Wurden die Fahrer mit Gegenverkehr konfrontiert, während sie sich mit einer schwierigen Begleitaufgabe beschäftigten, kam es häufiger vor, dass vor dem Freigeben des Überholmanövers der rückwärtige Verkehr nicht beachtet wurde. Um solche Sicherheitsrisiken zu vermeiden, empfehlen die Forscher, dass das Fahrzeug den Menschen an den Blick in den Rückspiegel erinnert und gegebenenfalls mit Hilfe von Sensordaten vor dem rückwärtigen Verkehr warnt. Hier kann wiederum die Technik den Menschen effektiv unterstützen; beide können also ideale Partner sein. Gefördert wurde das Projekt im Rahmen des Verbundprojektes KoFFI zur Kooperativen Fahrer-Fahrzeug-Interaktion vom Bundesministerium für Bildung und Forschung.









Highlight

Weitere Topevents

Vergeistigter Geistlicher - Koffer mit Bargeld und Dokumenten vergessen - merkt es erst am Abend
Seinen Trolli hatte ein Geistlicher am Samstag in Mittelbiberach (bei Biberach) eingebüßt. Drin waren...weiterlesen
Närrisch am Arbeitsplatz: Das ist erlaubt
Nicht mehr lange und das närrische Treiben erreicht seinen Höhepunkt. Während die einen den...weiterlesen
Ein Trümmerfeld auf der Autobahn - schwerer Unfall heute Früh blockiert stundenlang A8 bei Dornstadt
kein guter Wochenstart: ein wahrliches Trümmerfeld auf der Autobahn, vier Verletzte und stundenlanger...weiterlesen
Dieb zückt in Ulmer Hirschstraße Messer
Am Dienstag soll einem 17-Jährigen Geld aus der Tasche gefallen sein. Ein Unbekannter hob sie auf und...weiterlesen
Fußgängerin tödlich verletzt - 19-jähriger Autofahrer fegt zwei Passanten nieder
Ein 19-Jähriger Autfahrer beschleunigt beim Abbiegen an einer Kreuzung in der Göppinger Innenstadt...weiterlesen
Nächstes Kapitel im Fall: eine Erbschaft unter den Nagel gerissen und als Stiftungs-Verwalter auch noch bereichert
Der Fall ist höchst prätentiös: Offenbar gibt es einen Neu-Ulmer Notar, der einem anderen Notar a.D....weiterlesen
Fachkräftebrücke mit Südafrika – spannend: nun mit Insight Trip Südafrika - künftige Azubis, ihre Berufsschulen und Facharbeiter werden besucht
Das Unternehmerehepaar Roxanne und Michael Kreutle mit Sitz in Munderkingen hat eine Fachkräftebrücke...weiterlesen
Erneut Schüsse in Gaststätte
In einer gemeinsamen Pressemitteilung der Staatsanwaltschaft Ulm und Polizei geben beide bekannt:...weiterlesen


